The simply named “AA-44” (short for Anti-Air, 4-legs 4-barrels) project is something I decided to do for fun and practice. I wanted to combine something I was very passionate about (guns and artillery devices) with something I wanted to learn much more about (modelling, rigging, and animating). So I decided to design and model a fantasy robot, then rig and animate it.
I’m going to talk more about my inspiration and planning, so if you just wanna see pretty progress pictures, scroll down. QUICK, BEFORE I START TALKING ABOUT BORING STUFF
I really like stationary guns, cannons and artillery. The Flak 88, ZPU-4, the M-45G quad .50, etc. They’re just super cool to me. Likewise, I’ve always really enjoyed the mechanical technology behind everything in the 1900s, and the idea of extending the design philosophy’s further. The Soviet’s in WW2 had a large emphasis on using stationary or mounted medium and heavy machine guns as infantry support weapons as well as anti air guns. Back then they had a lot of those guns mounted on wheels, for easy transport by infantry (whereas American/Germans generally just packed up the tripod/mount seperately) and I thought it would be cool to take the idea of an easily transported anti-air gun further. Thus, the idea for this project was born.
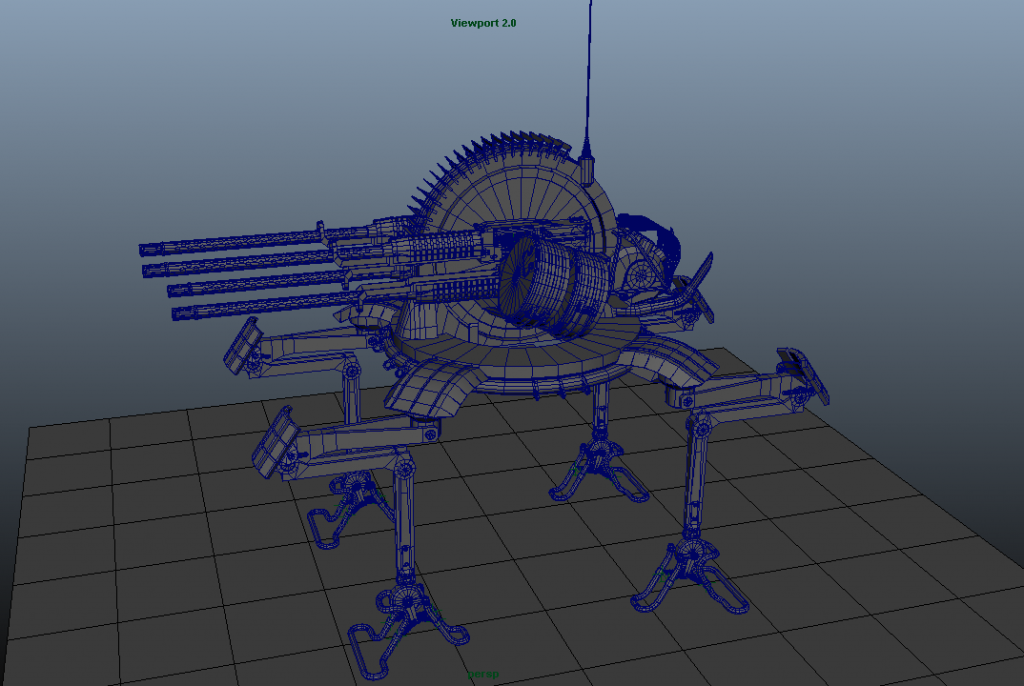
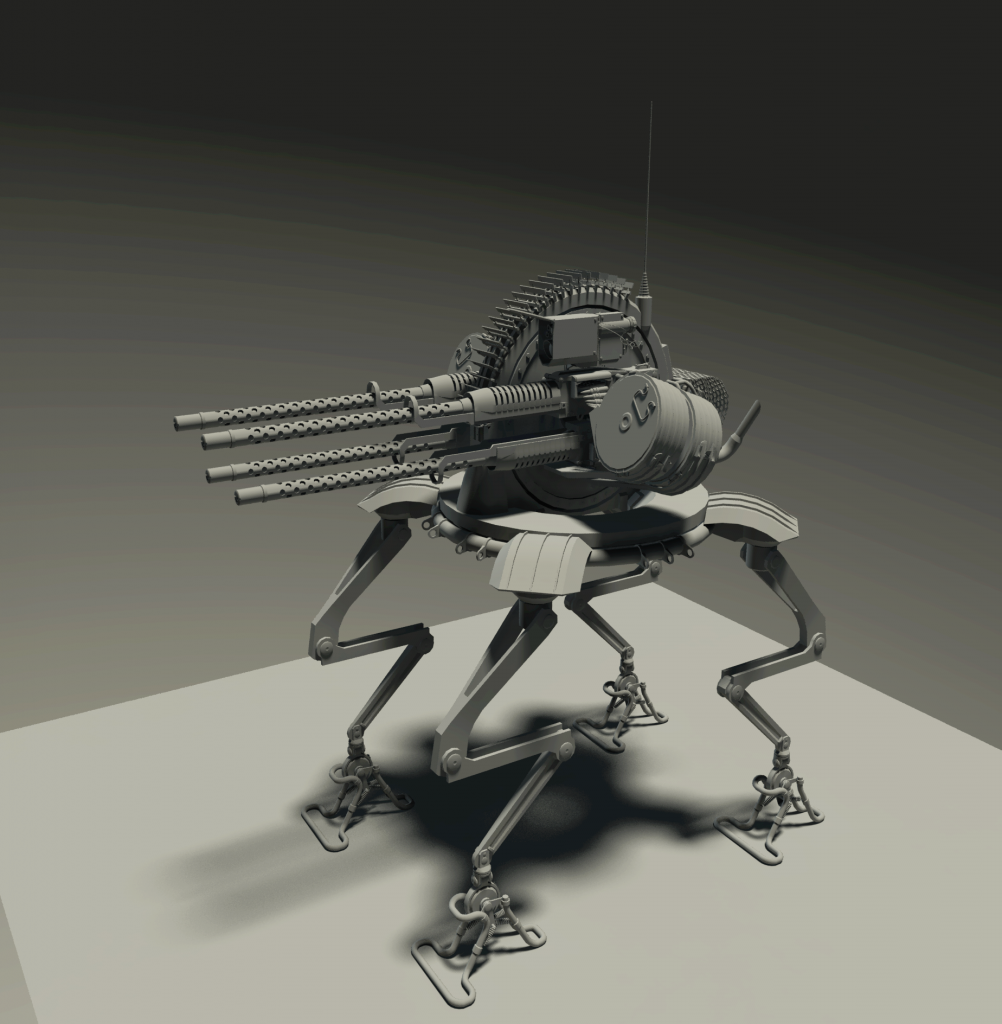
I knew I wanted a dual or quad barrel machine gun assembly , on top of a set of at least four legs. I’d probably want some kind of belt feeding system, because it would look cool and I had no experience modelling or rigging that kind of thing, which meant I’d have something to learn. I messed around with a couple different barrel and drum configurations before I realized I should be taking progress pictures. I also thought of adding either a camera or sensor mount to the front of the hull, but I didn’t want to “humanize” the machine too much. I wanted it to look more like a piece of machinery than anything with a head or eyes. I opted instead for a rack of sensor plates along the main hull piece.
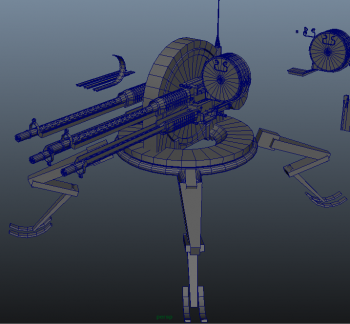
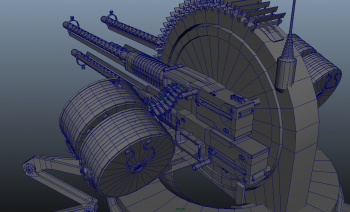
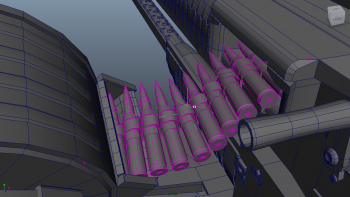
I drew inspiration from a lot of 40s, 50s, and 60s technology. If you know your guns really well, I’m sure you can spot some familiar shapes in here. I decided that a quadruple barrel looked the coolest after looking at the Shilka self propelled AA platform. I decided I want to basically scale that down to something that could be broken down and carried by a squad of men, or a dedicated weapons team. There are parts in the guns inspired by the American M-60, Browning M1919, Browning M2, and Russian DShK, and the main chassis is based heavily off of the Russian ZPU-4. I used curves for the belt shapes, and then projected a single bullet/link mesh across them, forming belts. I knew I wanted to have the belts feed and jiggle realistically, and figured this was the best way to do that.
I had a hell of a lot of fun modelling this thing. I discovered a lot of new tricks I didn’t know before while trying to get over some of the more difficult aspects of the modelling, but the trickiest part of the design was the legs and feet. I wanted to try and avoid ball-sockets, because those were way too easy to rig. I wanted to try and design a system that used a combination of hinges, springs, and swivels/servos to make a practical looking foot system, that would also allow flexibility with the motion of the machine. I also wanted the legs to be able to fold up, in a way that would be practical for maintenance, disassembly, or storage. I played with a lot of different foot shapes until I got something I liked.
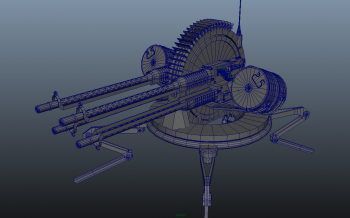
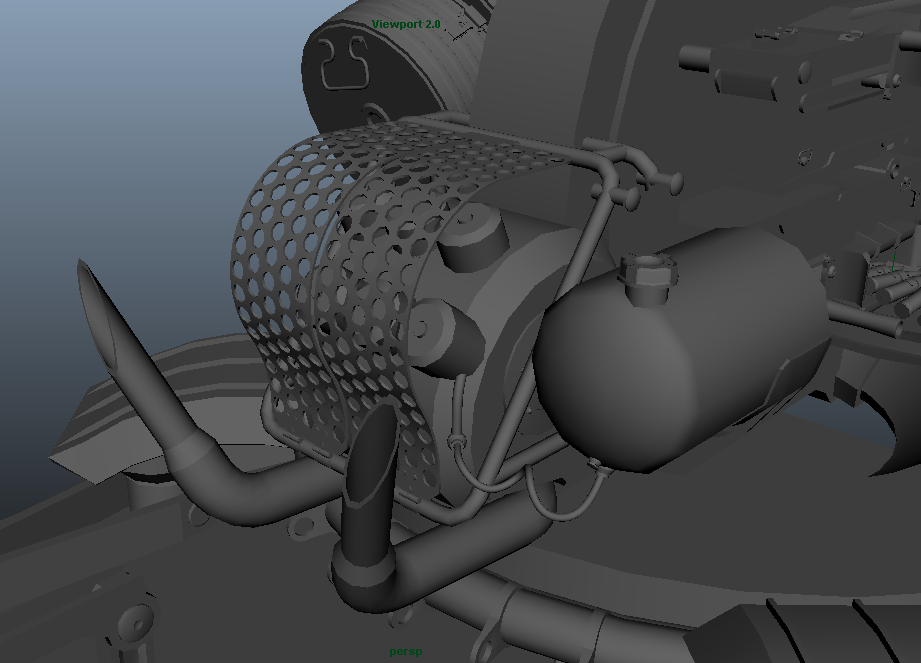
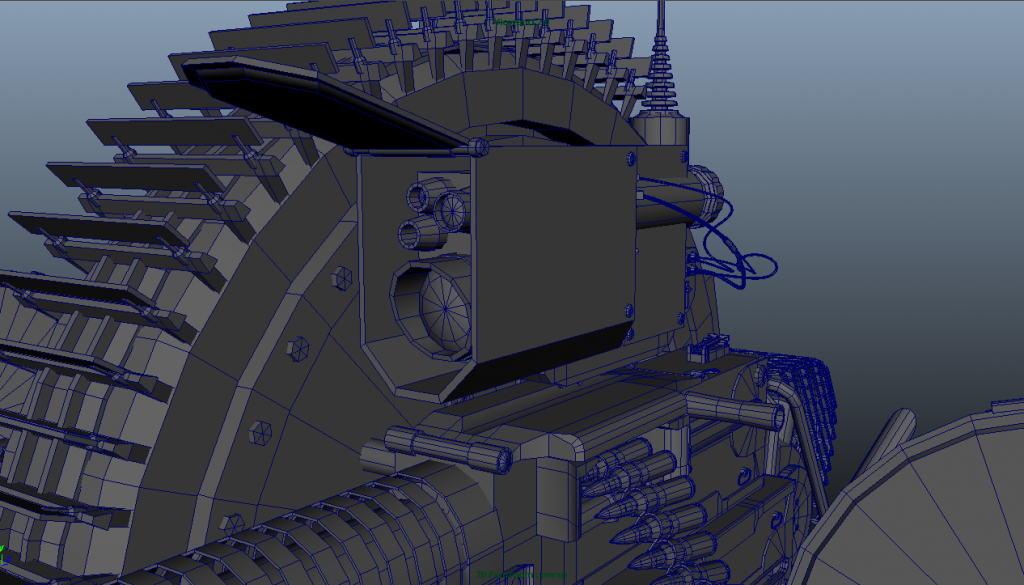
After that, I was just noodling with stuff until I had everything the way I wanted. I had been trying to decide on a way to add more machinery to the mech, which a friend of mine so eloquently described as “it needs more guttyworks.” I agreed, and threw an engine on. I tweaked the legs a couple more times after realizing a mechanical design error that wouldn’t allow for the proper range of motion, then added more details to the guns, some plating, and rivets. I wanted to create something like a Soviet version of Boston Dynamic’s “Big Dog” robot, which was designed to carry heavy loads for soldiers in uneven terrain. So I threw on some mounting rings, that could be used to either tow equipment, or hang spare tools and bags off of, if the machine were to be joined to an infantry unit. I also threw a scope onto one side of the machine. Originally I had thought it would receive directions for anti-air applications from a larger targeting computer at a radar station, but I decided I wanted it to be able to fire directly against infantry targets as well, and an optical device would be required for that. I used curves for all the cables and tubing in the engine and scope, in case I wanted to animate them or give them physics later.
After all that, the model was done!
I rigged the thing, which was an adventure for me. I hadn’t done anything more than really basic rigging of humanoid characters before this, so having to come up with ways to rig the antenna, the ankle joints, the spring-loaded feet pads, and so on was really interesting. I’m not 100% happy with the current rig, as it has some limitations that I would want to improve upon in the future, but it’s miles ahead of anything I would have thought I could create at the start of this project. I have a control on the turret which can be blended between an aim constraint (which allows for stabilization) and a rotation control, I have a physics based antenna that wobbles, the feet can by angled on all axis, the leg joints have limits that prevent them from over-extending and clipping through geometry, and the bullet belts can move however I want them to.
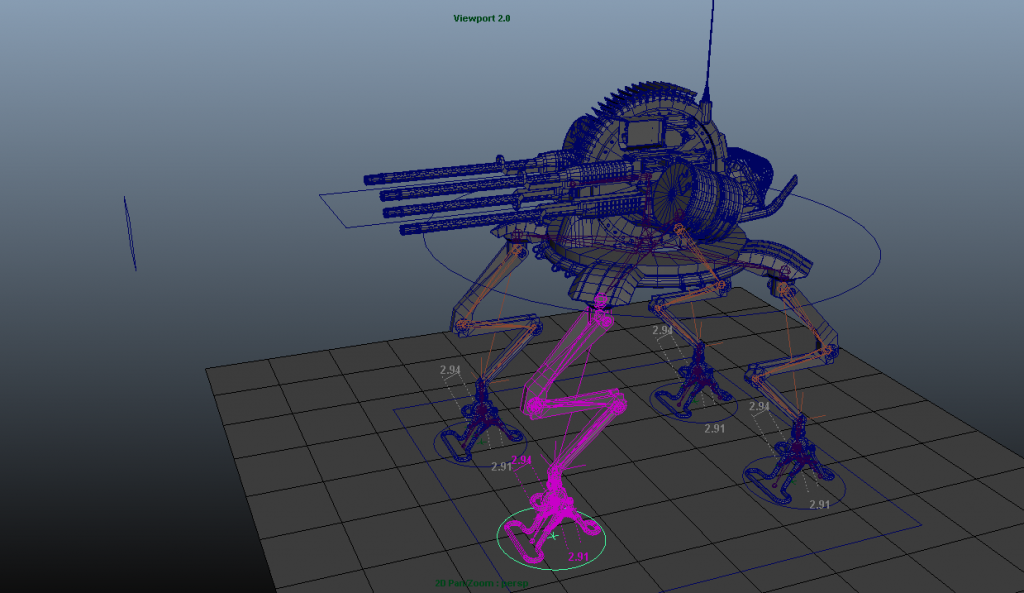
Finally, I could start animating. I decided on the name “AA-44” just because it looked and sounded cool. It stands for Anti-Aircraft 44, the 44 referring to the number of barrels and legs.
